������݂��������ք��R�eϵ�y�OӋ
�r�g��2020��03��28�� ������Փ�� �Δ���
����ժҪ:���˙C����ϵ�y�У��ք��R�eϵ�y�õ��ˏV�����á�����ʹ�ք��R�eϵ�y�܉��ڷǽ��|ʽģʽ�¹������OӋ��һ�N������݂��������ք��R�eϵ�y��ԓϵ�y���÷ǽ��|ʽ��݂�����FDC2214�B�ӆ��渲�~�壬�Ը�֪���ֵ׃�������yԇ�ߵ��ֿ����yԇ�^��ĸ��~��r��������ݔ���Ĕ����������l�����@��׃�������˵õ����ӷ����Č��r���ֵ�����������˿������V���;�ֵ�V���㷨���M�����F�քݵ�Ӗ�����R�e�����⣬��STM32�����������������OӋ���Դ�D�Q�·���Z����ʾ�·�����^�yԇ�����OӋ����ͨ�������͜yԇ�^����Ч�����ϵ�y�����Ժ͜yԇ�����m�ȡ�ԓ�ք��R�eϵ�y���܉F“��ȭ”��“��ȭ”��“�˙C���”�ȹ��ܣ����\�����á��R�e�ʸߡ�Ȥζ�ԏ����_���ˌ��r��Ҫ����ˣ�ԓ�ք��R�eϵ�y�����^�ߵđ��Ãrֵ��
�����P�I�~:�ք��R�eϵ�y;��ݙz�y;FDC2214;��ͨ�������͜yԇ�^��;�������V��;��ֵ�V��
�������Փ��Ͷ�忯������������c�o���a����ԭ����������������������1980�꣬���������������о������k���F�����F����Cе����(���F)��˾�P����I���ϵ���Ҋ�Ͱ��ţ���2009��Ԫ�����������߉�����о�Ժ����˾���������^��ʮ������\�����������Ԕ������Ϣ���f��ݡ��l����V�������˻������x��Ⱥ���ѽ��γ�֪��Ʒ�ƣ��l�з����鼰ȫ�ИI���P�I��ԺУ������Ժ������늹��ИI�����V����֪���Ⱥ�Ӱ�����
����0����
�����S���Ƽ��İlչ���ք��R�e���g���о��ѽ�ȡ�����^���Mչ[1��2]��Ŀǰ���ք��R�eϵ�y�Č��F����Ҫ���v�˔��������O�䡢��W��ӛ������ҕ�X�ք��R�e�����A�Ρ����������O���W��ӛ���������܉��ṩ���õęz�yЧ��������Ҫ�r���F�͏��s���O�䡣������ҕ�X���ք��R�eϵ�y���ܵ����íh���⾀�ĸɔ_�^���m���ڴ����O��[3]��
������݂��м��g���܉�Мy��ͬ�IJ���(Ƥ�w�����ϡ�Һ�w��)�����Ҿ��и�֪���x�ɱ��͡��ǽ��|�͟oĥ�p�����c������ȡ����W�z�y���g[4��5]�����Ļ��ڵ��݃x��(TI)��˾�Ƴ��ĸ߷ֱ��ʡ����ġ��ͳɱ��ķǽ��|ʽ���ʽ������FDC2214[6��11]����STM32F407ZGT6��Ƭ�C����ƺ��ģ��OӋ��һ���ք��R�eϵ�y(���c�OӋ�˜yԇ�^��)�����ÿ������V���;�ֵ�㷨����FDC2214�Ĕ����M��̎���������ϵ�y�Ŀ��ɔ_�������yԇ������ԓϵ�y���Ќ��r�ԏ��������Ըߺ��Ñ��Ѻõ����c��
����1���wϵ�y��D
����ϵ�y��Ҫ���Դģ�K����Ƭ�C����ģ�K��������ģ�K��TFFLCD�@ʾ��ģ�K��LED���@ʾģ�K���Z��ģ�K�Լ��yԇ�^��֧�ܽM�ɡ�ԓϵ�y��STM32F407ZGT6��Ƭ�C����ƺ��ģ�����FDC2214�B�Ӹ��~�壬���F��ݔ����IJɼ�����������ͬ�ք����a���IJ�ͬ��ݔ���ֵ������ք�Ӗ�����R�e�ȹ��ܡ����˳�Ҋ�Ą�ȭ�Α�Ͳ�ȭ�Α�֮�⣬ԓϵ�y߀�����OӋ�������Α���“�ڰ���”��“�˙C���”�ȡ�ͬ�r��ԓϵ�y�İ��Iģ�K���Z��ģ�K��LED�cTFTLCD�@ʾģ�K���Mһ��������ԓϵ�y���˙C�������������У����Iģ�K���F��Ӗ��ģʽ��Ӗ��ģʽ�ȵ��x��
����2Ӳ���OӋ
����2.1�Դģ�K�OӋ
������݂�����FDC2214����Ҫ����3.3V��늣�����Ƭ�C���������O�O�䣬��Ҫ����5V��늡���ˣ���ϵ�y��7.2V���늳���늣����^LM2596����ģ�K������5V��3.3V���o����ģ�K��늡����IJ��ÃɉKLM2596оƬ��
����2.2�Z��ģ�K�OӋ
�������������Ñ����w��ϵ�y�������Z����ʾ����:���w���õ���LMD102�Z��ģ�K[12]��ԓģ�K֧�ֶַ�������ֶβ��ź��S�r���Q�Z����Ϣ����ͨ�^����(RX��TX)�c��Ƭ�CSTM32�M��ͨ�š�
����2.3�ք��R�e�z�y
����ϵ�y�ęz�y��Ԫ�����˵��݃x��(TI)��˾���Ƶ���݂�����FDC2214[6��10]���乤��늉���3.3V�������и��ٵ�SPI�ӿڣ�����֧��оƬ���ú͂�ݔ���ֻ�DATAX�oSTM32����������STM32F407ZGT6��PB6���_����FDC2214��SCL���_�ĕr�ݔ��ˣ�PB7�����cFDC2214��SDA��ݔ�����c������������_��
����2.2.1FDC2214�z�yԭ��
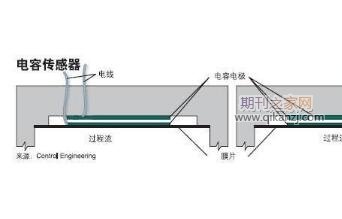
����FDC2214�ǻ���LC�C���·ԭ������ͨ����ݙz�y��������������������ݽ�����ʎ��LC�C���·�У��������·��һ�������������׃���D�Q���·��ʎ�l�ʵ�׃�����Ķ������y���l�ʵ�׃���õ����y����ݵ�׃����FDC2214�е�“CopperSensor”���֣�ͨ���Q��“FDC2214�Ă���ƽ��”��ԓƽ��錧�w���|[7��8]���ڱ���ϵ�y�OӋ�У������ˆ��渲�~�壬�քe�B���ڶ���J0��J3�ϡ����yԇ�ߵ��ֽӽ����~��ƽ��r���������˵����ֵ�l����׃�����@�͌�����LC�·��ʎ�l�ʵ�׃�����Ķ����Է�ӳ�քݵĽӽ����Լ����F�քݵ��R�e��
����2.2.2�yԇ�^����OӋ
�����yԇ�^����Ҫ�ɸ��~����ЙC�������ɡ������ЙC�����ǿ��]�����yԇ�����c���~����|��Ӱ푡��OӋ���P�I������OӋ�ֵķ���λ�ã��Լ����~����Π��С�͔[��λ�á������OӋ�����N�yԇ�^�����քe�dž�ͨ�������Ρ���ͨ����ָ�κ���ͨ�������Ρ���ͨ�������η������x����һ���K(20×20)cm�������θ��~������yԇ�^���^���H�yԇ��ᘌ���ͬ���քݣ�FDC2214���صĜyԇ�������x�ȴ^�ֶȺá����ǣ�ԓ�������քݵķ���Ҫ��ߡ������Բ���˷����R�e�傀��ָ�Ƿ��ڸ��~���ϣ��OӋ����ͨ����ָ�η��������]�������ֵ���r���������߂��^С�ĸ��~��혋�ɡ�
������ˣ���Ҫ2�KFDC2214ͬ�r�M�вɼ������^���H�yԇ��ԓ�����z�y���ȸߣ������yԇ�ߵ�����Ҫ���^�࣬�҃ɉKFDC2214֮�g������ɸɔ_���Y�����σɷN�����ă�ȱ�c���OӋ����ͨ�������η�����ᘌ��^�y�^�ֵ���ָ�^������һ�K�^��ĸ��~�壬ͨ�^�O�����ֵ�ݶ��ֵ���Д���ָ�����������Ƹ����t�O�������K�^С�ĸ��~�塣ͨ�^�Д�߉“0”��“1”����z�y��Ĵָ���Єe�ֵķ����^���H�yԇ�l�F��ԓ���������^�ֶȸߣ������ܿɿ��������Ըߡ�ͬ�r���ڸ��~���ϣ��g��һ�����x(1cm)�����w����m�е��ЙC������Ч�����ѡ���ˣ����IJ�������ͨ�������Μyԇ�^��
����3ܛ���OӋ
����3.1�������OӋ
�����������OӋ���ք��R�eϵ�y����Ҫ�߂�2��ģʽ��2�N�Α��ܡ�2��ģʽ�քe��Ӗ��ģʽ���Єeģʽ����Ӗ��ģʽ�У�ᘌ�����yԇ�ߣ��M�в�ȭ�̈́�ȭ���ք�Ӗ�������ЛQģʽ�У�ᘌ��yԇ�ˆT�M�в�ȭ�̈́�ȭ�ЛQ��2���Α��ܷքe�Dz�ȭ(������ʯ�^�Ͳ�)�̈́�ȭ(1��2��3��4��5)������֮�⣬��չ�˄�ȭ�Ĺ���———“��ȭplus(6��7��8��9��10)”��������“�ڰ���(������)”��“�ȴ�С”��“��ȭ”���˙C�����Α����ԓϵ�y��Ȥζ�ԡ�
����3.2ϵ�y�����OӋ
����ϵ�y�ij����OӋ��������“ǰ���_”�ij����OӋ˼�롣���У����_������5ms�Ķ��r������Ҫ���FDC2214�����IJɼ����I�P�Ē���̎��;ǰ�_������Ҫ��ɔ�����̎����Ӌ����@ʾ�ȹ��ܡ��ڱ�ϵ�y�еİ��I�x���Ѓ�2���Ӽ�����һ���x����x��Ӗ��ģʽ���Єeģʽ��Ӗ��ģʽ��ɺ����M���ЛQģʽ����2�Nģʽ�£����O�в�ȭ����ȭ����ȭPlus���ڰ���(������)�ͱȴ�С��5�Nģʽ�ĵڶ���ģʽ�x�����⣬��ͨ�^���㰴�I��;�Kֹ�Α��ߣ�ֱ���M����һλ�Ĝyԇ�c�ЛQ���������^���ж����S���Z��������ʾ�����Ү����I�x��ǰģʽ��LED��ʾ���������⣬��չ�˄�ȭ�Ĺ���———“��ȭplus(6��7��8��9��10)”��������“�ڰ���(������)”��“�ȴ�С”��“��ȭ”���˙C�����Α�����w�OӋ˼·���O���S�C����random()��ʹԓϵ�yģ�M���S�C�������N�քݣ����c�yԇ�ߵ��ք��M�б��^���o����ؓ��ͨ�^�Z����ʾ������ϵ�y��Ȥζ�ԡ�
����4ԇ�yԇ
����4.1ᘌ�ij�yԇ�ˆT���N�քݵ��ֵ�O��
����ͨ�^TI��˾ᘌ�FDC2214EVM�_�l����λ�Cܛ��SensingSolutionsEVMGUI���o����ij�yԇ�ˆT���N�ք��������ĸ�ͨ�����y�������ֵ׃��������Μy�õ����ֵ׃���M��ƽ���������õ�ᘌ�ԓ�yԇ�ˆT�ĸ��N�ք��ֵ�O����
����4.2���ܜyԇ
������Ո��3λ��ͬ�Ԅe�����g(���У�С��1��)�Ĝyԇ�ߣ��yԇ�����OӋϵ�y��ϵ�y���ܡ����w����:��Ӗ��ģʽ�£�3λ�yԇ��3�ε�ƽ��Ӗ���r�g;���Єeģʽ�£�3λ�yԇ��10�ε�ƽ���R�e���Ⱥ��R�e�r�g�����H�yԇ������ƽ��Ӗ���r�g��ƽ���R�e�r�g��С��30s���M�㌍�r��Ҫ���ң�ƽ���R�e���ȣ��_����90%���ϡ�ͨ�^�����l�F���`�R�e���ǰl����С�����ϣ���Ҫԭ����С�������^С����Ӗ�����Єe�r���քݷ���Ҫ���^�ߡ�ͬ�r��������չ����Ҳ�M���˜yԇ��Ч������������չ�Ĺ�����Ч������ԓϵ�y��Ȥζ�ԡ�
����5�YՓ
�����������ʽ������FDC2214���ք��R�eϵ�y�܉F“��ȭ”��“��ȭ”��“�˙C���”�ȹ��ܡ��ڌ��H�yԇ�У�ԓϵ�y�\�����ã��R�e�ʴ_�ʸߡ�����߀����ᘌ�С�����ք��Mһ�������yԇ�^����OӋ�����⣬���ƏVԓϵ�y�đ��ã�С�ͻ��OӋҲ��һ������ԓ�ք��R�eϵ�y�����^������Ãrֵ�����ԑ������˙C�����O����OӋ�С�
���������īI:
����[1]�����������i���˝���.���ڼ��ٶȂ��������ք��R�eϵ�y[J].Ӌ��C���ã�2018��38(S2):279��281��295.
����[2]���������DŽP�ɣ���ƽ.ʹ�ó����������֙C�ք��R�e[J].Ӌ��C�����c���ã�2018��54(2)��239��245.
����[3]��ϼ�����ҚJ���S�G��.�ք��R�e�о��lչ�F��C��[J].��ӿƼ���2013��26(6):171��174.
����[4]�Ϻƽܣ����£������A����.������݂��е�Ƕ��ʽ���w�ք��R�eϵ�y[J].��Ӽ��g��2018(10):19��20
- ������Ӌ�������O�����ܱO�yϵ�y
- �����¼��Ķ˵���ҕ�Xλ���R�e���O���W�j�ܘ�
- �����_Դ���g���O�I�վC�ϱO��ƽ�_��̽���c���`
- �������l���g�Ĕ��ּ����·�ϻ��������ܶ�λϵ�y
- �����˹����ܵęC�����赸�����Ԅ������о�
- һ�N����ҕ�l�z�y���g�Ľ�ͨ·�ڈ��ڙC����
- С�ӱ��»���CNN-DCGAN����|�ֲ����ģʽ�R�e����
- ���ڻ���µ��F�ˆT��ɢ��늚�ϵ�y�OӋ�о�
- �����̘I IP �_�l��ُ�������ƏV�I�N���Է���
SCI�ڿ�Ŀ�
���T�����ڿ�Ŀ�
SCIՓ��
- 2025-04-03Current Science�ڿ�Ͷ���֪
- 2025-04-03�؏�SCI�����˵IJ��Լ��؏��ŵ�
- 2025-04-02Journal of Blood Medicine�t�W4
SSCIՓ��
- 2025-02-28�������о����IӢ��Փ�Ŀ��x��
- 2025-02-19Cogent Education�ڿ��օ^��Ӱ�
- 2025-02-10���܌��I���ٰl��ssciՓ�ĵ�����
EIՓ��
- 2025-04-02Ҋ����z�����EI���h���]��ƥ��
- 2025-03-05EI���h���İlՓ�ģ����ָ��
- 2025-03-01EI���hՓ��ֵ�ðl��?2025EI���h
SCOPUS
- 2025-02-07ʲô��ȫ���͔�����?scopus����
- 2025-01-24scopus�l�����¸�ʽ��ָ��
- 2024-11-19Scopus��䛵Ľ���������ڿ�
���g��ɫ
- 2024-11-22���H�����ڿ��l��Փ�đ�ԓ��ʲô
- 2024-11-22���H���Ľ̎����ڇ��H�����ڿ��l
- 2024-11-22���H�����ڿ��u�Q���J��
�ڿ�֪�R
- 2025-04-01�ͺϲ��ϿƌW�c����Փ��Ͷ��word
- 2025-04-01��ȫ����Փ�����]�m��Ͷ�IJ�ͬ��
- 2025-03-2915��������p�����ڿ�!�T���ͣ�
�l��ָ��
- 2025-03-31���x��ͨ�����I��Փ���x�}31����
- 2025-03-28��Ӽ��g�c���ܼҾ߿Ʌ����īI37
- 2025-03-25늴����䷽���°l����Փ���īI